*For full research publications, please visit my Google Scholar page.
2026


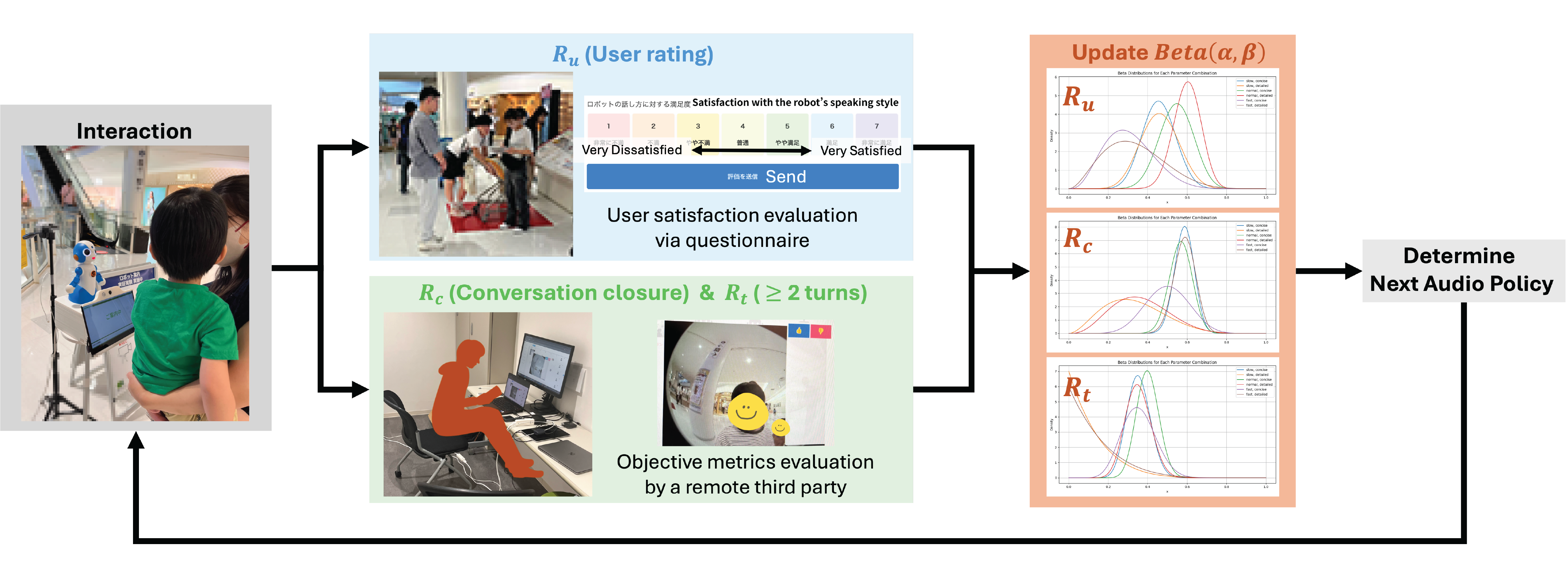
What You Reward Is What You Learn: Comparing Rewards for Online Speech Policy Optimization in Public HRI
Designing policies that are both efficient and acceptable for conversational service robots in open and diverse environments is non-trivial. Unlike fixed, hand-tuned parameters, online learning...